

全國服務熱線
18018737509
全國服務熱線
18018737509

電 話:18018737509
電 話:13823726967
郵 箱:527843680@QQ.COM
網 址:http://www.czqingyue.cn
地 址:深圳市龍華區觀湖街道觀城社區環觀南路105-13號201-203
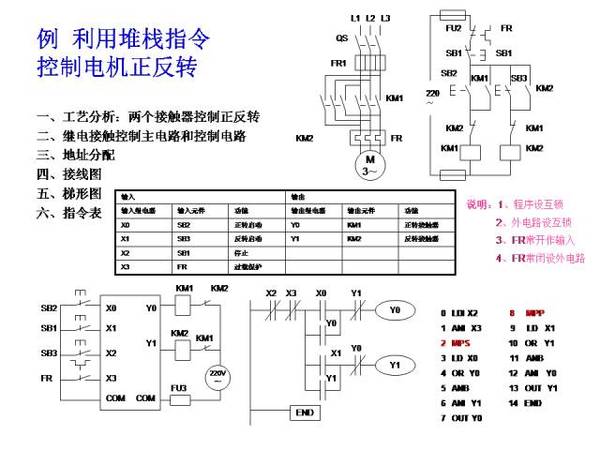
什么正轉,反轉,那是在外圍連接線定義的,你只要知道,在幾秒內輸出一個信號,輸出端接通。在幾秒后又輸出一個信號,另一個輸出端接通。就完了。
不知道你要這個程序有什么用?沒有實用性嘛,普通電機,4s可能還沒轉起來呢。如果只是想練習正反轉的話,用兩個接觸器,相序換一相,控制接觸器開,合就好了。至于時間,用PLC里的T計時器就好了。
你哪里寫反轉了!
一個單按鈕控制電機正反轉的三菱plc程序,即按一下正轉,再按一下反轉,按下停止按鈕電機停止工作。請
LDC1
RSTC1
LD==
其中是啟動按鈕,是正轉,是反轉
實現正反轉和調速是兩個問題。
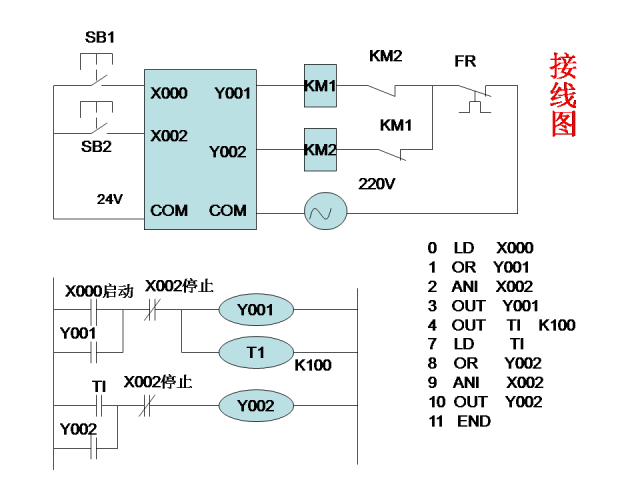
正反轉就簡單了,兩個Y輸出點,控制兩個接觸器,兩個接觸器分別對應調換的正負極就可以實現了。
用PLC調整就得用數字量轉模擬量的模塊來實出了,不過你得加一個數字輸放端如HMI.
三菱PLC怎么控制正反轉?
你需要兩個Y點輸出,一個用來發脈沖,另一個做方向信號,為0時正轉,為1時反轉。這個在伺服驅動器上都有相應接線端子。兩次程序唯一區別就是有一次多接通了一個Y點。
如果使用脈沖來控制伺服,那么你有兩種方式:正向脈沖伺服正轉,反向脈沖伺服反轉脈沖讓伺服旋轉,do輸出決定伺服方向。
如果使用模擬量控制伺服,那么你可以使用正負模擬量進行正反轉的控制。
如果使用通訊控制,那么直接發指令。
程序上,靠這個方式:
1.可以直接輸入位置令其正,反轉
2.jog命令其正反轉
三菱PLC使用DRVI指令如何定義正反轉
PLC中指令使用
1、可調脈沖輸出指令PLSV
為任意時間可變速指令,可以實時改變脈沖頻率的指令,在指令中可以設置脈沖的實時頻率、發出脈沖的輸出點,和方向點(如用于手動前進或后退)。但是不能設置發出脈沖的總數,也就是不能通過指令定位,如果需要不是很精準的定位可以在使用高速點的時候用脈沖計數器和目標值做一個比較,但是會在PLC的每個掃描周期比較一次,所以會超出一些脈沖。程序例:︱-----︱︱-----------(PLSV)2、絕對定位指令DRVA和相對定位指令DRVI
輸出只能應用于高速點。他們的指令表現形式基本一致,在它們的指令中可以設置脈沖總數、脈沖頻率、脈沖的發出點和方向點。
高速脈沖點的特點就是他們有自己的脈沖計數寄存器,也就是不管通過上述哪個指令發出脈沖,高速點會有以一個特定的寄存器記錄所發出的脈沖數,包括正向的和反向的,可作為運動控制中每個軸的坐標。
以上兩個指令不同之處就是:DRVA是絕對記錄脈沖式的,它的脈沖總數實際是它要到達的目標值,也就是和各高速點的計數寄存器相匹配,例如,當你輸入脈沖目標值為,而你高速點的計數寄存器中是,這時它會朝著反向發出個脈沖;而DRVI指令卻不同,它不管高速點計數器中的脈沖坐標值,它會向正方向運行個脈沖,因而成為相對脈沖指令。
程序例:︱-----︱︱-----------(DRVA)程序例:︱-----︱︱-----------(DRVI)
3、原點復位指令ZRN是三菱PLC的原點回歸指令。應用指令編號是,前面加D表示32位。快到原點位置時觸發一個接近開關,當工作臺運行到近零點時,收到接近開關觸發信號后減速到一個很低的速度繼續向前走(避免機械沖擊)。在低速狀態下等待伺服驅動器內置編碼器發來原點脈沖。收到脈沖后停止行走。程序例:︱-----︱︱-----------(ZRN)。

電話號碼:18018737509
傳真:0755-2101 7659
郵箱:527843680@QQ.COM
深圳市龍華區觀湖街道觀城社區環觀南路105-13號201-203
18018737509
服務熱線


