

全國服務熱線
18018737509
全國服務熱線
18018737509

電 話:18018737509
電 話:13823726967
郵 箱:527843680@QQ.COM
網 址:http://www.czqingyue.cn
地 址:深圳市龍華區觀湖街道觀城社區環觀南路105-13號201-203
plc一般不會直接接伺服電機,而是先接伺服驅動器,由伺服驅動器去控制電機,具體要幾根線就要看你的伺服電機和驅動器是什么樣的了,這些說明書上都有,上位機是指控制級的上一級,比如由工控機去控制plc,那么工控機就是上位機,有plc控制驅動器那么plc就是上位機
脈沖控制幾點說明:
1、:該元件在發出脈沖時被驅動,且有脈沖輸出時是動作的。回
2、16位與答32位指令在使用常數K時沒什么影響,但在用到寄存器D上時,區別在于占用寄存器的數量上,16位用一個(D0),32位用2個(D1,D2)。
3、SET指令用在步進STLS?時,SET置位到下一步時(如SET),同時會復位本步(如RST)
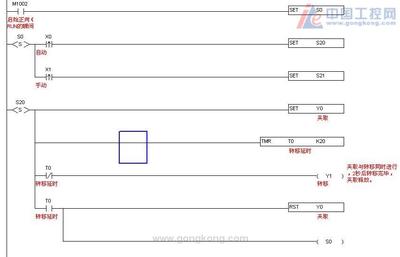
程序分析:
從20步開始時驅動(建議你直接用常開代替);
(NO)→(NC)→M2(NO)→(NC)→輸出脈沖本段看起來好像沒問題,但是如果動作后,脈沖輸出的條件沒有了,(你用了下延)導通一個掃描周期(你可以看一下掃描周期)來驅動;
問題來了,導通時間不足置位(這個你可以在監控狀態看到),另外一個是和講的一樣,脈沖停止需要時間,(建議加入脈沖停止指令,這個是立即停止的)同一個指令多次使用(多線圈)就會有多種多樣的問題。

三菱PLC控制伺服電機編程怎么弄
你還是把工作流程圖畫出來,這樣大家才能幫你。不過估計不大可能編好了現成的程序給你的。
因為第一沒有條件進行程序調試,這樣的程序幾乎%都是需要上機調試的。第二,你知道這種非標的4-5軸的程序,編程的市場價格是學生很難承受的。
否則,只好推薦你去看三菱PLC的編程手冊了。根據里面的樣例,你自己琢磨和實驗,就可以了。
首先設置伺服電機驅動器的參數。
1.---控制模式選擇,設定參數為0或是3或是4。3與4的區別在于當32(C-MODE)端子為短時,控制模式相應變為速度模式或是轉矩模式,而設為0,則只為位置控制模式。如果您只要求位置控制的話,設定為0或是3或是4是一樣的。
2.,,---增益與積分調整,在運行中根據伺服電機的運行情況相應調整.達到同服電機運行平穩。當然其他的參數也需要調整(,,,,也是很重要的多數),在您不太熟悉前只調整這三個參數也可以滿足基本的要求.
3.---指令脈沖輸入選擇,默認為光耦輸入(設為0)即可。也就是選擇3(PULS1),4(PULS2),5(SIGN1),6(SIGN2)這四個端子輸入脈沖與方向信號。
4.,---簡單地說就是控制伺服電機運轉方向。設為0時,設為3,則5(SIGN1),6(SIGN2)導通時為正方向(CCW),反之為反方向(CW)。設為1時,設為3,則5(SIGN1),
6.(SIGN2)斷開時為正方向(CCW),反之為反方向(CW),正、反方向是相對的,看您如何定義了,正確的說法應該為ccw,CW
5.、、---電子齒輪比設定。此為重要參數,其作用就是控制電機的運轉速度與控制器發送一個脈沖時電機的行走長度。
伺服電機(servomotor)是指在伺服系統中控制機械元件運轉的發動機,是一種補助馬達間接變速裝置。
伺服電機可使控制速度,位置精度非常準確,可以將電壓信號轉化為轉矩和轉速以驅動控制對象。伺服電機轉子轉速受輸入信號控制,并能快速反應,在自動控制系統中,用作執行元件,且具有機電時間常數小、線性度高、始動電壓等特性,可把所收到的電信號轉換成電動機軸上的角位移或角速度輸出。分為直流和交流伺服電動機兩大類,其主要特點是,當信號電壓為零時無自轉現象,轉速隨著轉矩的增加而勻速下降。

電話號碼:18018737509
傳真:0755-2101 7659
郵箱:527843680@QQ.COM
深圳市龍華區觀湖街道觀城社區環觀南路105-13號201-203
18018737509
服務熱線


